
В наши дни сложно встретить в продаже жесткие диски в розничной упаковке с документацией, еще сложнее разобраться, что скрывается под крышкой диска и что собой представляют те или иные технологии, которые используются в производстве.
Так, популярная для спецификаций накопителей аббревиатура GMR (Giant Magneto-Resistive) означает свойство сверхмагниторезистивности, которое используют в GMR-покрытии головок жестких дисков. И именно считывающие устройства с GMR-слоями позволяют увеличить объемы памяти «винчестеров» до нескольких десятков и даже сотен гигабайт на каждую пластину. Но давайте заглянем под крышку диска...
Жесткий диск изнутри
|
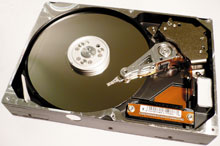
| Рис. 1. Так устроен жесткий диск |
Если мы откроем гермоблок жесткого диска, то увидим несколько зеркальных дисков, блок магнитных головок для записи и чтения информации (закрепленный на приводе), два мотора (шпиндель дисков и транспорт для считывателя) и блок управления сенсорами (рис. 1). Однако в этой статье нас будет интересовать только устройство и принципы работы сенсорных головок.

|
| Рис. 2. Здесь, на самом кончике держателя, расположена головка |
Магнитная головка имеет сверхскромные габариты и находится на самом кончике держателя (рис. 2). Она представляет собой сложную конструкцию, состоящую из множества деталей, которые изготавливаются методом фотолитографии и имеют линейные размеры в нанометровой области (около 100 нм).
Количество магнитных головок указывается производителем в технической документации к жесткому диску, обычно их бывает от одной до шести — в зависимости от количества физических дисков и их рабочих поверхностей (диски бывают как одно-, так и двухсторонними). Установка и удержание головки на магнитной дорожке обеспечивается электромагнитной системой позиционирования. При раскрутке магнитных дисков считыватели трутся о поверхность пластин в специальной парковочной зоне, не используемой для записи информации, пока не будет достигнута скорость, достаточная для того, чтобы сенсоры буквально взлетели над поверхностью.
В рабочем положении считывающие головки находятся в долях микрона от поверхности магнитного диска, не касаясь его (порядка 0,13 мкм, а в ближайшие несколько лет, по прогнозам, это расстояние может быть уменьшено до 0,05 мкм). При выключении питания контроллер производит автоматическую парковку головок, перемещая их в парковочную зону, где головки безопасно опускаются на поверхность дисков.
Современные сенсоры жестких дисков — сдвоенные, и для записи информации используется индуктивная головка. Она преобразует цифровые данные в переменное магнитное поле, которое намагничивает участок диска. Однако для чтения информации с диска она не подходит, так как амплитуда считываемого сигнала зависит от скорости перемещения магнитного покрытия, а высокий уровень шумов затрудняет верное распознавание слабых сигналов.
Для чтения данных используются MR- или GMR-головки (Magneto-Resistive — магниторезисторная, Giant Magneto-Resistive — сверхмагниторезисторная), на кончиках которых находится или однослойный MR-сенсор, или многослойный GMR-сенсор соответственно. Подобные датчики представляют собой резисторы, сопротивление которых изменяется в зависимости от напряженности магнитного поля. Причем амплитуда не зависит от скорости изменения магнитного поля, что позволяет на порядок снизить количество ошибок при считывании информации c диска и, как следствие, значительно повысить предельную плотность записи.
Как работает GMR-датчик?
GMR-сенсор состоит из четырех тонкопленочных (их толщина всего 1—5 нм) слоев (рис. 3):
- чувствительного (sensing layer) - иногда его называют свободным (free) слоем; сделан из железоникелевого сплава; в нем электроны могут свободно менять свою ориентацию;
- проводящего (conducting spacer) - изготовлен из ненамагничиваемого материала, а именно меди; необходим для уменьшения взаимного магнитного влияния соседних слоев;
- фиксирующего (pinned layer) - состоит из кобальта; магнитная ориентация постоянная;
- обменного (exchange layer).

|
| Рис. 3. Схема строения GMR-головки жесткого диска |
Магнитная ориентация свободного слоя изменяется в ответ на небольшие намагниченные области (биты) на диске, вращаясь относительно магнитной ориентации фиксирующего слоя, когда бит данных на диске проходит под элементом GMR.
Направление магнитного поля внутри фиксирующего слоя всегда остается одним и тем же — это достигается за счет функционирования обменного слоя. А вот в чувствительном слое направление магнитного поля изменяется в зависимости от направления внешнего магнитного поля. Это в свою очередь приводит к изменению общего сопротивления чувствительного и фиксирующего слоев — срабатывает GMR-эффект.
В его основе лежат квантовые свойства электронов, в частности такая характеристика, как спин. Спин электронов может иметь только два направления: вверх и вниз. Электроны проводимости со спином, направление которого совпадает с направлением магнитного поля внутри GMR-среды, испытывают меньшее сопротивление при движении и имеют большую свободу перемещения, чем электроны со спином, ориентированным навстречу (противонаправленным) внутреннему магнитному полю, которые чаще сталкиваются с атомами среды и потому испытывают при движении большее сопротивление. В первом случае электрическое сопротивление среды будет меньше, чем во втором (рис. 4). На этом явлении и построена работа GMR-сенсора.
|
| Рис. 4. Движение электрона в слоях магнитной структуры |
Когда вращение электронов соответствует магнитной ориентации слоя, в котором это происходит, они встречают более низкое сопротивление. В результате общее сопротивление уменьшается и обеспечивает устойчивый сигнал и высокое качество считывания информации. Как следствие, плотность записи на поверхности диска может быть значительно повышена.
Посмотреть анимированную модель действия GMR-головки можно на странице, посвященной достижениям компании IBM в научных исследованиях, по адресу: http://researchweb.watson.ibm.com/research/demos/gmr/index.html.
По параметрам GMR-головки намного превосходят MR-аналоги. GMR-головки могут улавливать гораздо более слабые сигналы, что позволяет увеличить поверхностную плотность записи накопителя в несколько раз. Кроме того, они не так шумят, не столь подвержены интерференции и имеют меньшие размеры, несмотря на многослойность. Все это делает GMR-технологию востребованной и перспективной.
Как все было
Развитие технологий, применяемых в головках жестких дисков, можно разбить на несколько этапов:
- до 1979 г. - использование классических индуктивных головок записи/воспроизведения;
- 1979-1991 гг. - применение тонкопленочных (TFI) головок;
- 1991-1995 гг. - применение магниторезисторных головок (с MR-сенсорами);
- с 1995 г. и до настоящего времени - применение супермагниторезисторных головок (с GMR-сенсорами).
Сначала разработчики жестких дисков шли по пути увеличения емкости жестких дисков, повышая для этого поверхностную плотность записи данных (areal density), т.е. количество бит данных, записанное на единице площади поверхности дисковой пластины и измеряемое в гигабитах на квадратный дюйм — Гбит/дюйм2. Но чем плотнее упакованы данные, тем слабее сигнал для считывающего устройства, а чувствительности TFI-головок явно не хватало. Попытки увеличить ее наращиванием числа витков обмотки привели к возрастанию индуктивности, которая, к сожалению, ограничила возможности записи с помощью таких головок.
Магниторезисторные (MR) головки из железоникелевых сплавов обладают большей чувствительностью к магнитным полям, чем их TFI-аналоги. Однако и их возможности ограничены, а требования пользователей возрастают год от года. И тут появилась новая перспектива развития данных технологий — уменьшение магнитного зазора в записывающей головке благодаря применению сверхтонких нанометровых пленок и повышение чувствительности головки чтения за счет использования многослойных материалов с аномально высоким коэффициентом магниточувствительности.
Это стало возможным благодаря GMR-эффекту, который был открыт сотрудниками одной из исследовательских лабораторий IBM во время изучения свойств образцов с четкой кристаллической структурой, помещенных в сильное магнитное поле: определенное сочетание специальных материалов уменьшало их электрическое сопротивление. К 1991 г. IBM методом напыления изготовила многослойные поликристаллические GMR-образцы. В том же году были разработаны образцы GMR-структур, чувствительных к слабым магнитным полям. А в 1994 г. IBM объявила о создании первого в мире сенсорного элемента на основе GMR-эффекта, способного считывать данные с магнитной поверхности жесткого диска. И началось вытеснение с рынка не только индуктивных считывающих головок, но и магниторезисторных.
Перспективы нанотехнологий
В настоящий момент нанотехнологии в производстве компьютерных компонентов — отрасль весьма популярная. Она освоена производителями всех комплектующих ПК, и сфер ее применения становится все больше.
В Рочестерском университете уже разрабатываются методы управления отдельными атомами при изготовлении транзисторов и микросхем, что должно радикально повысить их производительность. В так называемом «транзисторе с баллистическим отклонением» (ballistic deflection transistor, BDT) отдельный электрон пропускается через поляризованный затвор и отражается от клиновидного препятствия. Электрическое поле затвора отклоняет электрон к одной или другой стороне канала так, что он отталкивается от правой или от левой грани клина и отражается вправо или влево, что соответствует логическому нулю или логической единице (подробно схему работы технологии можно посмотреть на сайте www.Physorg.com).
А ученые университета Райс разработали свой метод разделения и сортировки нанотрубок для дисплеев ноутбуков (CNTD) по размеру и диаметру с помощью электрического поля, что существенно уменьшит затрачиваемое на этот процесс время, а значит, заметно снизит цену мобильных компьютеров. Причем теперь стало возможным сортировать не только обычные углеродные нанотрубки, но и полупроводниковые нанотрубки-композиты.
Есть надежда, что не отстанут от зарубежных коллег и отечественные ученые, ведь в 2007—2010 гг. российское правительство собирается профинансировать развитие нанотехнологии на сумму более 30 млрд. руб.